ToF Camera Eval Kit – Getting Started¶

About
The Eval kit was specially created for users who want a quicker start. A Raspberry Pi 4 & a ToF camera are bundled in a metal enclosure. Pre-assembled hardware with pre-installed software caters to quick evaluation. Additional air-cooling, compatibility with PoE HATs, and many more thoughtful features are awaiting your discovery. Let’s get started.
Step1: Check items against the packing list¶
Items included in the Kit package:¶
- 1 x Metal Enclosure (containing the following parts assembled)
- 1 x Raspberry Pi 4 (4GB) (with 1 x 16GB SD card with everything pre-installed, with 2-pin power cable & ribbon cable)
- 1 x Arducam ToF Camera
- 1 x Cooling fan (4 x 4 cm)
- 1 x Mini tripod
Step2: Check the power adapter type¶
Caution
Use a 5V/4A adapter with Pi OR the camera might NOT work properly.
Step3: Using the Kit¶
Connect the mini tripod to the metal enclosure. Power on the Kit and then start to run examples (or to run other commands of yours) once the system finishes booting.
Step4: Running Examples¶
Simply input the following commands respectively and enter. Examples will run automatically.
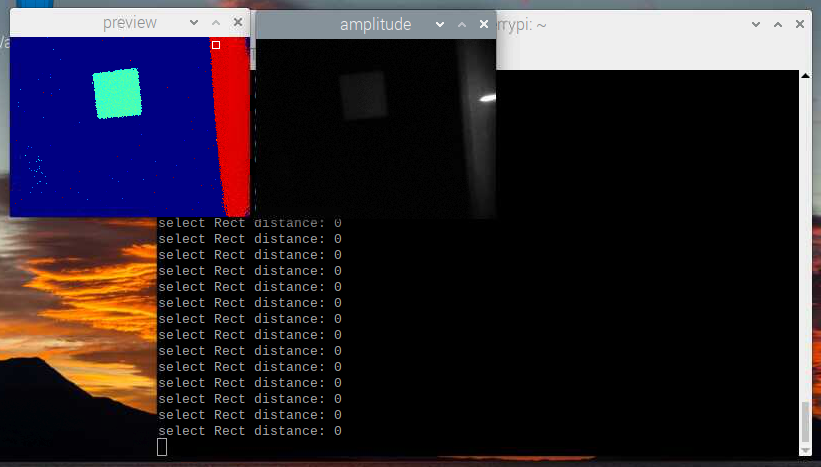
Example1: Preview Depth¶
Preview the Depth map and Gray-scale map example, using CSI interface connected to the camera.
preview_depth
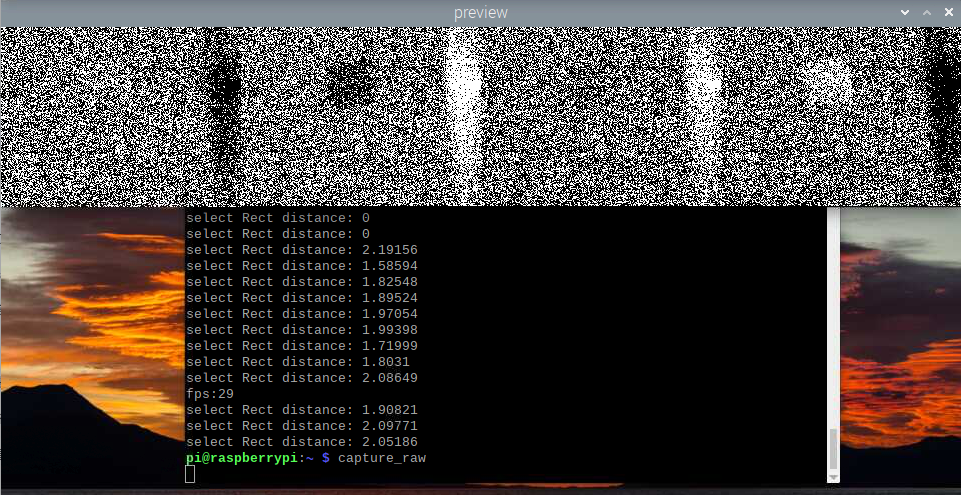
Example2: Preview Raw¶
Preview RAW data example, using CSI interface connected to the camera.
capture_raw
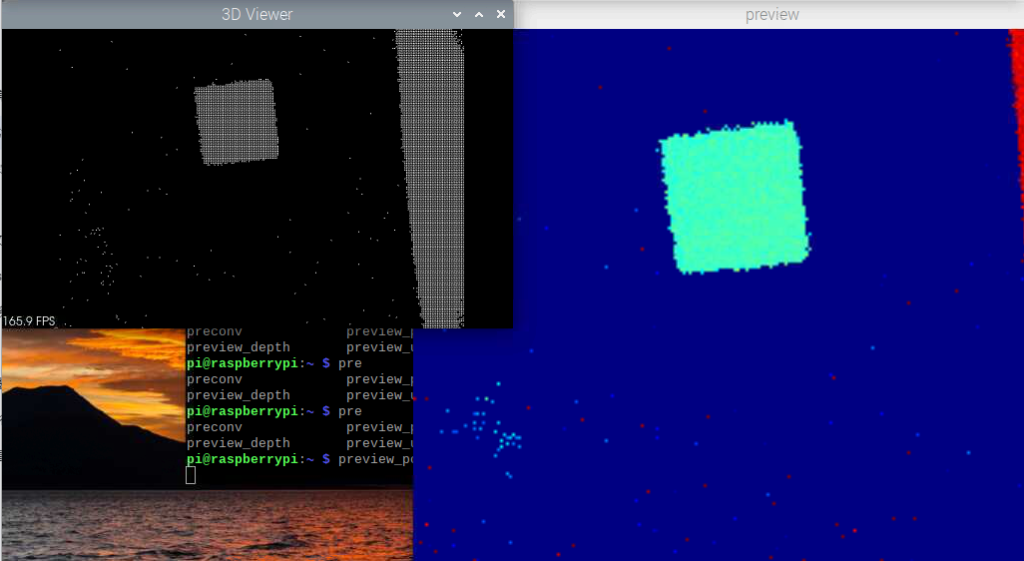
Example3: Preview 3D Point cloud¶
Preview 3D point cloud, using CSI interface connected to the camera.
preview_pointcloud
Example4: ROS2 Publishing¶
ROS2 publish point cloud topics
ros2 run arducam tof_pointcloud

Additional info¶
List of Installation Tools¶
System version: Raspberry Pi OS (32-bit) bullseye, published on 6th Sept. 2022
deb package¶
- libopencv
- libcblas-dev
- ibhdf5-dev
- libhdf5-serial-dev
- libatlas-base-dev
- libjasper-dev
- libqtgui4
-
libqt4-test
-
libpcl-dev
-
ros2-humble
-
arducam-tof-sdk-dev
- arducam-config-parser-dev
-
arducam-usb-sdk-dev
-
cmake
- git
- build-essential
pip package¶
- opencv-python
- ArduCamDepthCamera
Notes of Examples¶
Path of examples¶
/home/pi/Arducam_tof_camera
C++ Examples¶
/home/pi/Arducam_tof_camera/example
preview_depth: Running on Raspberry Pi, Preview the Depth map and Gray-scale map example, using CSI interface connected to the camera
capture_raw: Running on Raspberry Pi, Preview RAW data example, using CSI interface connected to the camera
/home/pi/Arducam_tof_camera/pcl_preview
Running on Raspberry Pi, Preview 3D pointcloud, using CSI interface connected to the camera.
/home/pi/Arducam_tof_camera/ros_publisher/src
Running on ROS2, publish pointcloud and depth topics
/home/pi/Arducam_tof_camera/jetson
jetson_nano_preview: Running on Jetson Nano, Preview the Depth map and Gray-scale map example, using CSI interface connected to the camera
jetson_nx_preview: Running on Jetson NX, Preview the Depth map and Gray-scale map example, using CSI interface connected to the camera
Python examples¶
/home/pi/Arducam_tof_camera/example/python
preview_depth: Running on Raspberry Pi, Preview the Depth map and Gray-scale map example, using CSI interface connected to the camera
capture_raw: Running on Raspberry Pi, Preview RAW data example, using CSI interface connected to the camera