RGBD ToF Depth Camera Kit
Overview¶
The Arducam RGBD ToF Camera Kit (also known as Arducam T2 All-in-One Kit) is the ultimate turnkey solution for developers needing immediate access to high-precision depth sensing. Integrating a 16MP RGB sensor and a VGA ToF depth sensor, this kit delivers 1% depth accuracy and frame rates up to 55fps on the Raspberry Pi 5.
Whether for robotics, AR/VR, or industrial automation, this kit streamlines the path from prototyping to production.


Key Applications¶
Versatile Use Cases
- Robotics: Obstacle avoidance, SLAM navigation, and object recognition.
- Augmented Reality (AR) / VR: High-precision environmental depth sensing.
- 3D Scanning: Detailed 3D model reconstruction.
- Industrial Automation: Quality control, package sorting, and volume measurement.
- Smart Home: Gesture control and security monitoring.
- Medical Devices: Non-invasive depth measurement for diagnostics.
Specifications¶
Comparison: Kit vs. Module¶
| Feature | All-in-One Kit (B0548) | Camera Module (B0556) |
|---|---|---|
| Image |  |
 |
| Component Type | Complete Solution (w/ Pi 5 inside) | Integration Module |
| Resolution | 16MP (RGB) + VGA (ToF) | 16MP (RGB) + VGA (ToF) |
| Stream Type | RGB + Depth Map | RGB + Depth Map |
| Interface | MIPI CSI-2 | MIPI CSI-2 |
| Target Use | Quick Prototyping / Turnkey | Custom Integration |
Hardware Setup¶
Power Requirements¶
Power Supply Recommendation
To ensure optimal stability and performance—especially when using the depth processor—an Official Raspberry Pi 27W USB-C Power Supply is highly recommended.
Handling Precautions¶
Critical Warning: Do Not Disassemble
Strictly NO Disassembly for the All-in-One Kit (B0548).
This product is factory-assembled and preciseness-calibrated as a sealed unit.
- Physical Damage: Disassembly carries a high risk of tearing internal ribbon cables and damaging connectors.
- Loss of Calibration: Opening the case invalidates the optical and depth calibration parameters. This will permanently destroy the depth sensing accuracy and render the device unusable.
Software Guide (Pre-built)¶
The Arducam RGBD Kit comes with system-wide aliases pre-configured. You can run these commands from any terminal path to access the 6 core demonstrations.
Login Info
- Username:
pi - Password:
raspberrypi - Helper Tool: Type
run-helpto list all available parameters and commands.
Pre-built Demonstrations¶
Access raw depth data without the RGB overlay.
1. Depth Preview (run-tof)
Preview the depth map and infrared intensity.
- Close Range Mode (Near):
run-tof --mode 0 - Long Range Mode (Far):
run-tof --mode 1

2. ToF Point Cloud (run-tof-pointcloud)
Visualize the raw 3D depth cloud (grayscale based on intensity).
run-tof-pointcloud

Combine the 16MP Camera color data with the ToF depth sensor.
3. RGBD Capture (run-rgbd)
Displays the color video stream synchronized with the depth map.
run-rgbd

Capture the RGB and depth frames in both synchronized and asynchronous modes.
run-rgbd-capture #Sync capture mode
run-rgbd-nosync #Async capture mode

4. RGBD Point Cloud (run-rgbd-pointcloud)
Renders a real-time, fully colored 3D Point Cloud.
run-rgbd-pointcloud

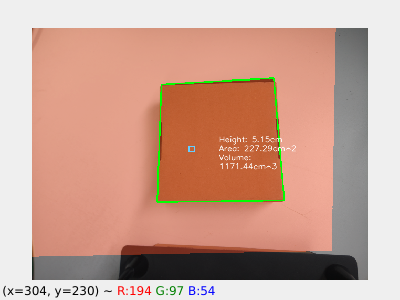
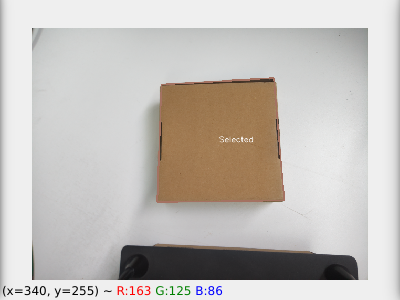
5. Volume Measurement (run-rgbd-volume)
Dynamically calculates the volume of objects using depth contours.
run-rgbd-volume
 |
 |
 |
|---|---|---|
| Mixed Window Displays object volume info. |
Contours Window Displays the selected object. |
Mask Window White: Reference Plane Gray: Object |
6. ROS 2 Integration (ros demo)
Launch the standard ROS2 node and visualization tools.
Step 1: Start the Node (on Raspberry Pi)
ros-setup
ros2 run arducam_rclcpp_rgbd_pointcloud rgbd_pointcloud
Step 2: Visualization
-
Option A: Local Visualization
Run directly on the Raspberry Pi(in a new terminal):
ros-setup rviz2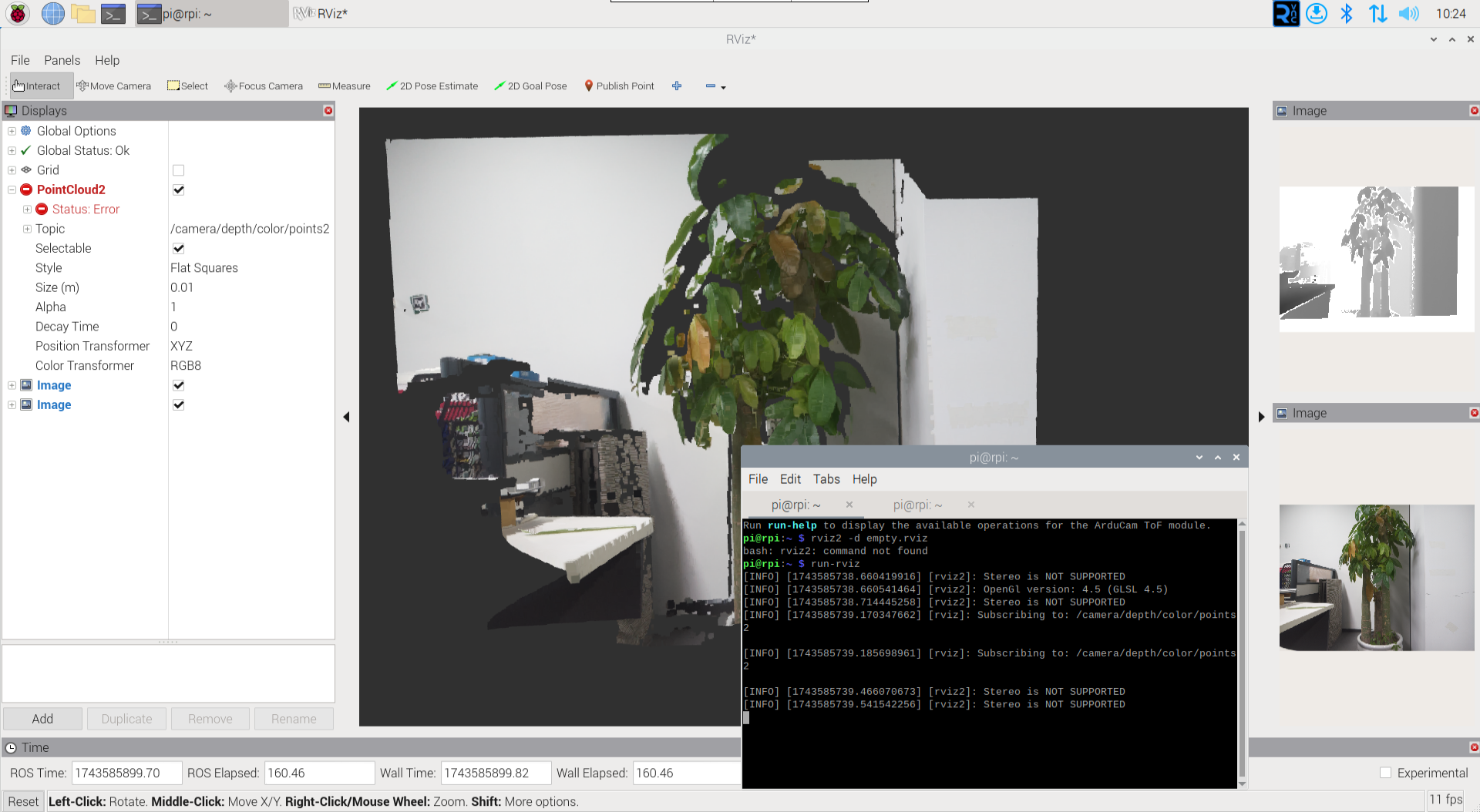
Local Rviz2 Visualization -
Option B: Remote LAN Visualization
You can also observe the data on another PC connected to the same Local Area Network (LAN) by launching
rviz2on the remote machine.
Remote Visualization via LAN
Developer Compilation Guide¶
If you intend to modify the source code or integrate the driver into your own C++ project, follow the compilation instructions below.
Use these instructions to compile the standalone depth sensor applications.
1. Basic Example
Compile the demo script:
cd ~/tof-examples
bash ./compile.sh
Success Indicator
If compilation is successful, the terminal will verify the path:
== Run /home/pi/tof-examples/build/example/cpp/example
Run the compiled binary:
/home/pi/tof-examples/build/example/cpp/example
2. Point Cloud
Compile the point cloud demo:
cd ~/tof-examples
bash ./compile_pointcloud.sh
Success Indicator
If compilation is successful, the terminal will verify the path:
== Run /home/pi/tof-examples/build/open3d_preview/preview_pointcloud
Run the compiled binary:
/home/pi/tof-examples/build/open3d_preview/preview_pointcloud
Use these instructions to compile the combined RGB + ToF applications.
Restriction Note
Please note that the source code for the example and volume_measurement demos is not currently supported for user compilation.
1. Capture Demo
Compile the source code:
cd ~/rgbd-examples/capture
cmake -Bbuild && cmake --build build -j4
Run the application:
# Run C++ Version(sync)
/home/pi/rgbd-examples/capture/build/capture
# Run C Version(sync)
/home/pi/rgbd-examples/capture/build/capture_c
# Run C++ Version(async)
/home/pi/rgbd-examples/capture/build/nosync_capture
# Run C Version(async)
/home/pi/rgbd-examples/capture/build/nosync_capture_c
Tip
Press q in the preview window to exit the program.
2. Point Cloud
Compile the source code:
cd ~/rgbd-examples/pointcloud
cmake -Bbuild && cmake --build build -j4
Run the application:
/home/pi/rgbd-examples/pointcloud/build/pointcloud
Tip
Press Ctrl + C in the terminal to force stop the program.
Video Demonstration¶
Explore the capabilities of the Arducam RGBD ToF Camera through these demonstrations.
-
Product Introduction

An overview of the Arducam T2 All-in-One Kit features and hardware design.
-
Point Cloud Demo

Real-time point cloud visualization demonstrating depth accuracy.
-
ROS 2 Integration

Seamless integration with ROS 2 for robotics applications.
-
Volume Measurement

Using depth data to calculate the volume of physical objects dynamically.